Sezione: Discussione alla Weierstrass
D'ora in avanti assumeremo che la risultante delle forze  sia una funzione di classe
sia una funzione di classe
 .
.
Ricaviamo
 dalla legge di conservazione dell'energia:
dove il segno della radice è determinato come vedremo dalle condizioni iniziali.
dalla legge di conservazione dell'energia:
dove il segno della radice è determinato come vedremo dalle condizioni iniziali.
Assegnate le condizioni iniziali
 |
(3.1) |
possiamo innanzitutto distinguere due casi:
-
-
Caso 1
Il segno della velocità iniziale
 determina il fatto che all'istante
determina il fatto che all'istante  il moto sia diretto (nel verso positivo dell'asse
il moto sia diretto (nel verso positivo dell'asse  ) o retrogrado (nel verso negativo di ). Possiamo dunque orientare l'asse in modo che sia
) o retrogrado (nel verso negativo di ). Possiamo dunque orientare l'asse in modo che sia
 .
.
Per continuità esiste
 tale che
tale che
 ,
,
 .
.
Allora
 .
.
Poniamo ora
 quindi
quindi
 |
(3.2) |
e
 .
.
Osservazione 3.1
Poichè  non può essere negativa, gli intervalli di in cui il moto è consentito sono quelli per cui si ha
non può essere negativa, gli intervalli di in cui il moto è consentito sono quelli per cui si ha
 , ossia
, ossia
 .
.
Tali intervalli potranno essere visualizzati tracciando il grafico della funzione  nel piano
nel piano  e la retta orizzontale
e la retta orizzontale  : le regioni ammissibili di saranno quelle dove il grafico di sta al di sotto della retta e tali tratti saranno finiti o infiniti a seconda che il corrispondente intervallo di sia finito oppure no.
: le regioni ammissibili di saranno quelle dove il grafico di sta al di sotto della retta e tali tratti saranno finiti o infiniti a seconda che il corrispondente intervallo di sia finito oppure no.
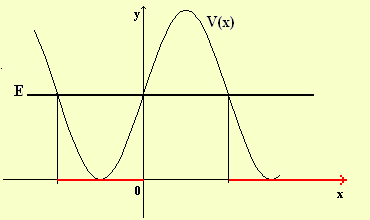
Esempio 3.1
Dato un potenziale come in fig.
3.1 notiamo che le regioni ammissibili sono solo quelle evidenziate in rosso.
Figura 3.1:
Regioni ammissibili di x
|
|
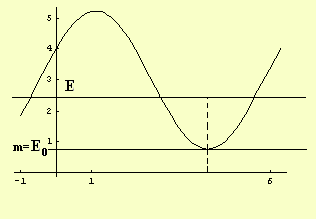
Osservazione 3.2
Per lo stesso motivo l'energia totale

può assumere solo i valori che soddisfano la condizione
 inf
inf
Esempio 3.2
Dato un altro potenziale come in fig.
3.2 che ammette un minimo assoluto
m notiamo che i valori ammissibili per
devono soddisfare la condizione
 = m
= m.
Figura 3.2:
Valori ammissibili
|
|
Dato
 distinguiamo ora i casi:
distinguiamo ora i casi:
- 1.1
-


- 1.2
-
 t.c.
t.c. 
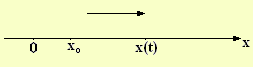
Caso 1.1
In questo caso si ha 
 , cioè il punto materiale ha velocità positiva quindi il moto è diretto
, cioè il punto si muove sempre nella direzione positiva dell'asse .
, cioè il punto materiale ha velocità positiva quindi il moto è diretto
, cioè il punto si muove sempre nella direzione positiva dell'asse .
Figura 3.3:
Moto unidimensionale lungo x
|
|
Sia ora  un punto arbitrariamente fissato sulla retta.
un punto arbitrariamente fissato sulla retta.
Calcoliamo il tempo  impiegato da
impiegato da  a raggiungere la posizione
a raggiungere la posizione  .
.
Dalla 3.2 si ha:
cioè
Integrando da  a otteniamo:
Assumendo per semplicità
a otteniamo:
Assumendo per semplicità  troviamo
troviamo
 |
(3.3) |
L'integrale al membro di destra di 3.3 è finito, in quanto la funzione integrande è continua su
![$ [x_0,+\infty]$](img296.png) e quindi limitata su
e quindi limitata su ![$ [x_0,t]$](img297.png) ,
,
 .
.
Questo ci permette di concludere che il punto impiega un tempo finito a raggiungere una qualunque posizione sull'asse a destra della configurazione iniziale. Quindi il moto di si svolge secondo questa modalità: parte da con velocità positiva e percorre tutto l'asse di moto diretto senza mai fermarsi, raggiungendo prima o poi, in un tempo più o meno lungo (ma finito!) una qualunque postazione preassegnata.
Tale moto è detto aperiodico e, nel caso specifico, diretto.
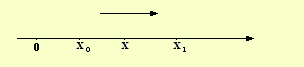
Caso 1.2
Sia
 min
min il più piccolo valore di in cui la
il più piccolo valore di in cui la  (e quindi la velocità) sia nulla.
(e quindi la velocità) sia nulla.
Figura 3.4:
Moto unidimensionale lungo x
|
|
Per quanto visto nel caso 1.1 possiamo subito affermare che il punto materiale raggiunge tutte le posizioni precedenti a  in un tempo finito più o meno lungo; si ha infatti di nuovo
in un tempo finito più o meno lungo; si ha infatti di nuovo
Essendo il "`primo"' valore di in cui  si annulla si avrà invece che il tempo
si annulla si avrà invece che il tempo
 impiegato a raggiungere è dato da un integrale generalizzato:
impiegato a raggiungere è dato da un integrale generalizzato:
 |
(3.4) |
La convergenza di questo integrale dipende dalla molteplicità di  come radice di .
come radice di .
Si distinguono perciò due ulteriori sottocasi:
- 1.2.1
- è una radice multipla di ;
- 1.2.2
- è una radice semplice di .
Caso 1.2.1
Sia dunque radice dell' equazione  di molteplicità
di molteplicità  , ovviamente
, ovviamente  ,
,  . Poichè
. Poichè
 per ipotesi possiamo allora scrivere nella seguente forma:
per ipotesi possiamo allora scrivere nella seguente forma:
 |
(3.5) |
con  ,
,
![$ \forall\in [x_0,x_1]$](img314.png) .
Ricordando la 3.2 e la 3.5 si può scrivere
Dalla 3.4 si ha allora
.
Ricordando la 3.2 e la 3.5 si può scrivere
Dalla 3.4 si ha allora
 |
(3.6) |
L'integrale generalizzato 3.6 è divergente perchè la funzione integranda
 è un infinito di ordine
è un infinito di ordine
 rispetto all'infinito campione
rispetto all'infinito campione
 per
per
 .
.
Dunque
 , cioè il punto materiale impiega un tempo infinito a raggiungere la posizione di ascissa . In altre parole non raggiunge di fatto , se non asintoticamente, cioè al limite per
, cioè il punto materiale impiega un tempo infinito a raggiungere la posizione di ascissa . In altre parole non raggiunge di fatto , se non asintoticamente, cioè al limite per
 .
.
Concludiamo che nel caso di radice multipla si ha un moto asintotico verso il punto di ascissa , a cui il punto si avvicina sempre più senza mai raggiungerlo.
Osservazione 3.3
Dalla
3.5 segue che se
è una radice di
essa è multipla se e solo se

, o equivalentemente

. Pertanto dal Teorema
3.1 si ha che una radice di
è multipla se e solo se è una configurazione di equilibrio.
Caso 1.2.2
Sia ora radice semplice dell'equazione , ciò significa che
 |
(3.7) |
per cui , per
 , può essere scritta come
, può essere scritta come
 |
(3.8) |
con ,
![$ \forall x\in[x_0,x_1]$](img328.png) .
.
Procedendo come prima, si ha
per cui, separando le variabili, ed integrando ambo i membri si ottiene
 |
(3.9) |
Anche questo è un integrale generalizzato, ma ora l' infinito è di ordine
 , per cui l'integrale converge.
, per cui l'integrale converge.
Dunque il punto impiega un tempo finito per raggiungere la posizione e all'istante  si ferma,
si ferma,  .
.
Ci chiediamo così come si comporterà il punto materiale dopo l'istante di arresto  .
.
Per saperlo occorre studiare il segno di
 .
.
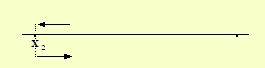
Osserviamo che
Ossia l'accelerazione è esprimibile in funzione di :
 |
(3.10) |
Figura 3.5:
Accelerazione
|
|
Allora dalla 3.8 si ha
 |
(3.11) |
Calcolando la 3.11 per  si ottiene, ricordando anche la 3.7,
si ottiene, ricordando anche la 3.7,
e in particolare

in quanto
 .
.
Ne segue che
è decrescente in un intorno di , ed essendo
 si avrà che esiste
si avrà che esiste  tale che
tale che

![$ \forall t\in]t_1,\bar{t}[$](img345.png) .
.
In generale possiamo affermare che quando il punto materiale incontra una radice semplice, ed ha un istante di arresto, inverte la direzione del moto essendo l'accelerazione  diversa da zero. A questo punto lo studio del moto riprende ripetendo l'analisi già fatta e si arriva facilmente alle conclusioni che seguono
diversa da zero. A questo punto lo studio del moto riprende ripetendo l'analisi già fatta e si arriva facilmente alle conclusioni che seguono
- se il punto materiale non incontra nessuna altra radice di , ovviamente minore di , prosegue percorrendo tutto l'asse negativo senza mai fermarsi e da questo momento il moto diventa aperiodico (retrogrado) come nel caso 1.1;
- se il punto materiale incontra la radice multipla
 , ovviamente
, ovviamente  , allora tende asintoticamente alla posizione di ascissa , come nel caso 1.2.1;
, allora tende asintoticamente alla posizione di ascissa , come nel caso 1.2.1;
- infine se il punto materiale incontra la radice semplice allora si ritorna al caso 1.2.2, cioè di nuovo si inverte il moto. Più precisamente dop aver raggiunto all'istante
con
 , il punto riparte con velocità positiva (riprende a percorrere l'asse nel verso positivo) e ripassa dalla posizione iniziale ad un istante
, il punto riparte con velocità positiva (riprende a percorrere l'asse nel verso positivo) e ripassa dalla posizione iniziale ad un istante  con velocità uguale alla velocità iniziale:
Assumendo ora come istante iniziale il teorema di unicità del moto (Teorema di Cauchy 2.1), fissate le condizioni iniziali
con velocità uguale alla velocità iniziale:
Assumendo ora come istante iniziale il teorema di unicità del moto (Teorema di Cauchy 2.1), fissate le condizioni iniziali
 ,
,
 , il punto ripete lo stesso tipo di moto che ha effettuato nell'intervallo
, il punto ripete lo stesso tipo di moto che ha effettuato nell'intervallo
![$ [t_0,\hat{t}]$](img353.png) . Dunque il moto risulta periodico nell'intervallo
. Dunque il moto risulta periodico nell'intervallo ![$ [x_1,x_2]$](img354.png) : il punto "`fa la spola"' indefinitamente fra i due punti e . Il periodo
: il punto "`fa la spola"' indefinitamente fra i due punti e . Il periodo  del moto sarà dato dalla somma del tempo
del moto sarà dato dalla somma del tempo  impiegato per andare da a e del tempo
impiegato per andare da a e del tempo  impiegato per ritornare da a . Tenendo conto del fatto che nel primo tratto per andare da a la velocità è negativa, mentre nel secondo tratto da a , la velocità è positiva, avremo:
impiegato per ritornare da a . Tenendo conto del fatto che nel primo tratto per andare da a la velocità è negativa, mentre nel secondo tratto da a , la velocità è positiva, avremo:
e
Pertanto
 così che
che è un integrale generalizzato in entrambi gli estremi ma è finito poichè e sono radici semplici di , per quanto visto precedentemente.
così che
che è un integrale generalizzato in entrambi gli estremi ma è finito poichè e sono radici semplici di , per quanto visto precedentemente.
Abbiamo così concluso lo studio del moto nel caso di
 , vediamo ora il caso in cui
, vediamo ora il caso in cui  .
.
Caso 2
Il punto materiale ha velocità iniziale nulla, .
Essendo
 si avrà
e quindi
si avrà
e quindi  , cioè all'istante iniziale il punto si trova in una posizione da ascissa coincidente con uno degli zeri di .
, cioè all'istante iniziale il punto si trova in una posizione da ascissa coincidente con uno degli zeri di .
Il moto del punto per  dipende dal valore di
dipende dal valore di
 e abbiamo due sottocasi:
e abbiamo due sottocasi:
- 2.1
-
 ,
,
- 2.2
-
 .
.
Caso 2.1
Se
, cioè il punto materiale ha un'accelerazione iniziale nulla, l'equazione di Newton 2.1 sarà
 |
(3.12) |
Dalla 3.12 segue che l'equazione del moto
 ammette come unica soluzione
ammette come unica soluzione  ,
, soddisfacente i dati iniziali
,
, soddisfacente i dati iniziali
 |
(3.13) |
Dunque il punto rimane immobile in ad ogni istante successivo a quello iniziale, e è una configurazione di equilibrio secondo la seguente definizione.
Definizione 3.1
 si dice configurazione di equilibrio se, posto il punto materiale in all'istante con velocità nulla, ivi rimane ad ogni istante successivo.
si dice configurazione di equilibrio se, posto il punto materiale in all'istante con velocità nulla, ivi rimane ad ogni istante successivo.
In base a quanto ottenuto sopra possiamo enunciare il seguente teorema.
è una configurazione di equilibrio se e solo se

, o equivalentemente,

.
Caso 2.2
Se
, cioè il punto materiale ha un'accelerazione non nulla, si metterà in moto con velocità positiva (moto diretto) se
 e con velocità negativa (moto retrogrado) se
e con velocità negativa (moto retrogrado) se
 .
.
Dimostriamo questa affermazione nel caso
. Nell'altro caso si procede in modo analogo.
Essendo
,
è crescente in perciò
 tale che
tale che
 ,
,
![$ \forall t\in ]t_0,\bar{t}[$](img383.png) .
.
Ne segue che esiste
 t.c.
Allora, poichè la funzione non si annulla nell'intervallo
t.c.
Allora, poichè la funzione non si annulla nell'intervallo
![$ ]x_0,\bar{x}[$](img386.png) possiamo calcolare il tempo impiegato dal punto a raggiungere la posizione
possiamo calcolare il tempo impiegato dal punto a raggiungere la posizione
![$ x \in ]x_0,\bar{x}[$](img387.png) mediante l'integrale
mediante l'integrale
|
(3.14) |
che è un integrale generalizzato in .
Tuttavia è una radice semplice di , poichè dalla 3.10 si ha
siccome per ipotesi
.
Allora, procedendo come nel caso 1.2.2 si ottiene che l'integrale 3.14 è convergente. Pertanto il punto impiega un tempo finito a raggiungere qualunque posizione  . Poichè per
. Poichè per
 la velocità
è non nulla, si può prender una qualunque di queste posizioni come configurazione iniziale, con corrispondente velocità iniziale diversa da zero, e da questo istante per lo studio qualitativo del moto si può ripartire esattamente dal Caso 1.
la velocità
è non nulla, si può prender una qualunque di queste posizioni come configurazione iniziale, con corrispondente velocità iniziale diversa da zero, e da questo istante per lo studio qualitativo del moto si può ripartire esattamente dal Caso 1.