Sezione: Elementi di calcolo vettoriale
Se
 e
e
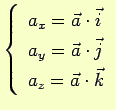
 è facile verificare che
è facile verificare che
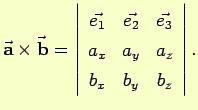
 è dato dal seguente determinante:
è dato dal seguente determinante:
Nel seguito, per la base canonica
 useremo la notazione più classica in Meccanica:
useremo la notazione più classica in Meccanica:
La terna
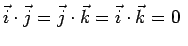
 è una base ortonormale, cioè i vettori sono a due a due ortogonali e ciascuno di norma unitaria:
è una base ortonormale, cioè i vettori sono a due a due ortogonali e ciascuno di norma unitaria:
e
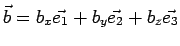
Da questo segue che se
 si ha
da cui si può scrivere
si ha
da cui si può scrivere